Standard HHMM
This notebook contains code to simulate data from a standard hierarchical hidden Markov model (HHMM) and then fit a model to the simulated data.
1. Create a model
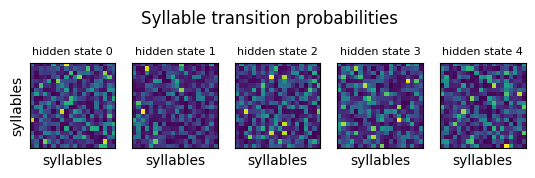
We’ll start by creating a random model with 5 high-level states and 20 syllables. The model parameters consist of two tensors:
trans_probs: transition probabilities between hidden statesemissions: transition probabilities between syllables for each state
from state_moseq.hhmm_standard import random_params
import matplotlib.pyplot as plt
import jax.random as jr
import jax.numpy as jnp
import numpy as np
hypparams = {
"n_states": 5,
"emissions_beta": 1,
"trans_beta": 1,
"trans_kappa": 100,
"n_syllables": 20,
}
simulation_params = random_params(jr.PRNGKey(0), hypparams)
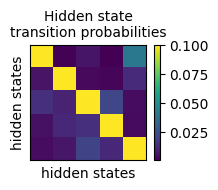
2. Visualize model parameters
import matplotlib.pyplot as plt
plt.imshow(simulation_params["trans_probs"], vmax=0.1)
plt.colorbar()
plt.xlabel("hidden states")
plt.ylabel("hidden states")
plt.title('Hidden state\ntransition probabilities', fontsize=10)
plt.xticks([])
plt.yticks([])
plt.gcf().set_size_inches((2,1.5))
fig,axs = plt.subplots(1, hypparams["n_states"], sharey=True)
for i in range(hypparams["n_states"]):
axs[i].imshow(simulation_params["emissions"][i])
axs[i].set_xlabel("syllables")
axs[i].set_xticks([])
axs[i].set_title(f'hidden state {i}', fontsize=8)
axs[0].set_yticks([])
axs[0].set_ylabel("syllables")
fig.subplots_adjust(top=1.45)
fig.suptitle("Syllable transition probabilities");
3. Simulate data from model
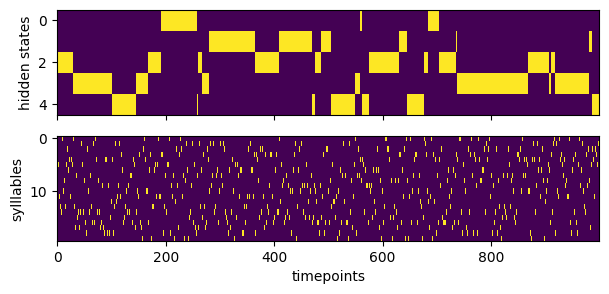
Now let’s generate fake data from the model. The simulation will first sample a sequence higher order states and then use those to generate a sequence of syllables.
from state_moseq.hhmm_standard import simulate
n_sequences = 200
n_timesteps = 1000
true_states, syllables = simulate(
jr.PRNGKey(2), simulation_params, n_timesteps, n_sequences
)
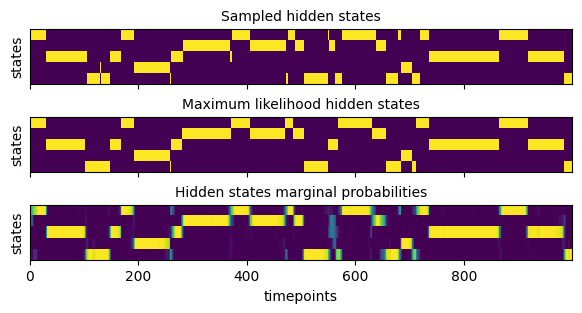
Visualize example “recording”
fig,axs = plt.subplots(2,1,sharex=True)
axs[0].imshow(np.eye(hypparams["n_states"])[true_states[0]].T, aspect='auto', interpolation='none')
axs[0].set_ylabel("hidden states")
axs[1].imshow(np.eye(hypparams["n_syllables"])[syllables[0]].T, aspect='auto', interpolation='none')
axs[1].set_ylabel("sylllables")
axs[1].set_xlabel("timepoints")
fig.set_size_inches((7,3))
4. Perform inference
Next we’ll try to infer the model parameters from the simulated data using Gibbs sampling. Before inference, we have to generate a data dictionary that contains syllables and an array called mask. The purpose of mask is to indicate missing data in the syllables array and is useful when modeling sequences of uneven length. In our case there is no missing data so mask will be all 1’s.
from state_moseq.hhmm_standard import initialize_params, fit_gibbs
data = {
"syllables": syllables,
"mask": jnp.ones_like(syllables),
}
# initial guess for parameters
init_params = initialize_params(data, hypparams, seed=jr.PRNGKey(3))
params, states, log_joints = fit_gibbs(
data,
hypparams,
init_params,
num_iters = 100)
100%|█████████████████████████████████████████| 100/100 [00:06<00:00, 14.78it/s]
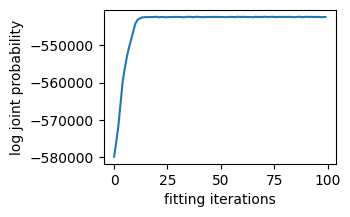
Check for convergence
To make sure the model converged, we’ll check for a plateau in the log joint probability
plt.plot(log_joints)
plt.ylabel('log joint probability')
plt.xlabel('fitting iterations')
plt.gcf().set_size_inches((3,2))
5. Inspect model fit
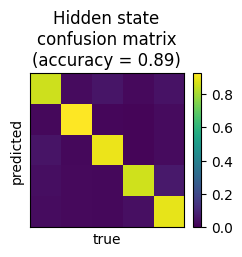
To compare true vs. inferred hidden states, the following code:
Generates and plots a confusion matrix
Calculates the accuracy, defined as the proportion of correctly classified timepoints (after permutation)
from state_moseq import compare_states
confusion, permutation, accuracy = compare_states(states, true_states, hypparams["n_states"])
plt.imshow(confusion[permutation], vmin=0)
plt.colorbar()
plt.title(f'Hidden state\nconfusion matrix\n(accuracy = {round(accuracy.item(),2)})')
plt.xticks([])
plt.yticks([])
plt.ylabel("predicted")
plt.xlabel("true")
plt.gcf().set_size_inches((2.5,2))